本实用新型涉及农机和园艺技术领域,具体涉及一种用于采摘高架种植的浆果的机械手,使用时,操作机械手,以使得待采摘浆果位于第一夹持手柄的前端的果斗和第二夹持手柄的前端的果斗之间,动力源启动进而驱动这两个果斗扣合,两个果斗的锯齿刀片相互咬合从而切断果根,被采摘下的浆果装在两个果斗中。采用该机械手来采摘高架种植的浆果后,无需人工爬梯采摘,节省了人力物力,降低劳动强度,提高采摘效率。由于果斗的内侧设有柔性保护垫,被采摘下的浆果与果斗内壁之间的作用力小,能够保障浆果完好无损。
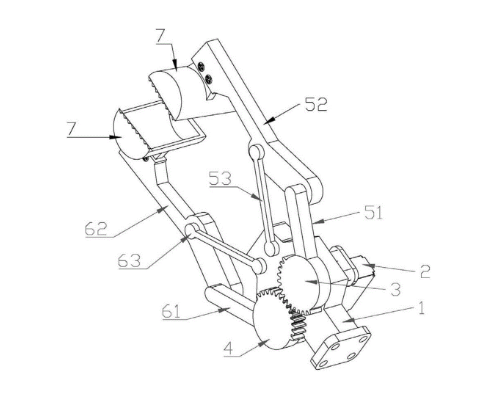
1.一种用于采摘高架种植的浆果的机械手,其特征是:包括支撑座、动力源、主动齿轮、从动齿轮、第一臂爪组件和第二臂爪组件,主动齿轮和从动齿轮相互啮合且分别铰接于支撑座,动力源固定于支撑座用于驱动主动齿轮转动; 第一臂爪组件包括第一曲柄、第一夹持手柄和第一连杆,第一曲柄的后端与主动齿轮连接,第一曲柄的前端与第一夹持手柄的后端连接,第一连杆的两端分别铰接支撑座和第一夹持手柄的中部;第二臂爪组件包括第二曲柄、第二夹持手柄和第二连杆,第二曲柄的后端与被动齿轮连接,第二曲柄的前端与第二夹持手柄的后端连接,第二连杆的两端分别铰接支撑座和第二夹持手柄的中部; 第一夹持手柄的前端和第二夹持手柄的前端分别固定有U形的果斗,果斗设有用于割断果根的锯齿刀片,果斗的靠近锯齿刀片之处设有橡胶垫,果斗的内侧设有柔性保护垫。
2.根据权利要求1所述的一种用于采摘高架种植的浆果的机械手,其特征是:主动齿轮和从动齿轮均为不完全齿轮。
3.根据权利要求1所述的一种用于采摘高架种植的浆果的机械手,其特征是:所述动力源为舵机。
4.根据权利要求1所述的一种用于采摘高架种植的浆果的机械手,其特征是:橡胶垫粘接固定于果斗。
请联系平台
请联系平台




