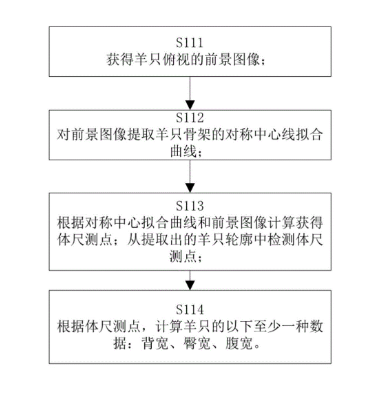
本发明提供基于羊只俯视图的羊只体尺检测方法,用于解决体尺参数测量或多或少需要用户的交互控制才能测量获得的问题。其中方法包括步骤:获得羊只俯视的前景图像;对前景图像提取羊只骨架的对称中心线拟合曲线;根据对称中心拟合曲线和前景图像计算获得体尺测点;根据体尺测点,计算羊只的以下至少一种数据:背宽、臀宽、腹宽。本发明通过自动识别羊只骨架的对称中心拟合曲线,提取体尺测点,从而计算出对应的羊只参数。避免了人工测量羊只使羊产生应激性,同时减少了测量羊只的工作量。并通过准确识别轮廓和轮廓中的体尺检测点,提高体尺测量获得的羊只参数的准确性。
1.基于羊只俯视图的羊只体尺检测方法,其特征在于,包括步骤: 获得羊只俯视的前景图像; 对前景图像提取羊只骨架的对称中心线拟合曲线l1; 根据对称中心线拟合曲线和前景图像计算获得体尺测点; 根据体尺测点,计算羊只的以下至少一种数据:背宽、臀宽、腹宽; 所述步骤根据对称中心线拟合曲线和前景图像计算获得体尺测点包括: 前景图像为羊头朝左的俯视图; X1为前景图像质心; 经过图像质心X1的直线m1将前景图像分为左右两区域,X2、X3分别为这两个区域的前景图像的质心; 分别经过X1、X2、X3的直线m1、m2、m3将前景图像划分为4个区域,X4、X5、X6、X7分别对应每块区域质心; 其中m1、m2、m3互相平行; X4、X2、X5分别垂直映射拟合曲线l1,X4’、X2’、X5’分别为对应的垂足; 用直线依次连接X4’、X2’、X5’,获得羊体胸部对称中心线; 用胸部对称中心线的垂线扫描前景图像,计算垂线在前景图像中的长度M; 根据长度M制作拟合曲线l2; 拟合曲线l2中曲率最小的点所对应的长度Mi,长度Mi对应的胸部对称中心线上的点为颈部起点A;拟合曲线l2对应颈部起点A到X5’部分曲线中,曲率变化最大的点为胸宽测点C;胸宽测点C对应的长度Mx即为胸宽。
2.根据权利要求1所述的方法,其特征在于,所述步骤对前景图像提取羊只骨架的对称中心线拟合曲线l1包括: 对前景图像进行骨架提取; 对获得骨架进行剪枝; 对剪枝的后的骨架进行曲线拟合,获得对称中心线拟合曲线l1。
3.根据权利要求1所述的方法,其特征在于,所述步骤根据对称中心线拟合曲线和前景图像计算获得体尺测点包括: 前景图像为羊头朝左的俯视图; X1为前景图像质心; 经过图像质心X1的直线m1将前景图像分为左右两区域,X2、X3分别为这两个区域的前景图像的质心; 分别经过X1、X2、X3的直线m1、m2、m3将前景图像划分为4个区域,X4、X5、X6、X7分别对应每块区域质心; 其中m1、m2、m3互相平行; X5、X1、X6分别垂直映射拟合曲线l1,分别获得垂足X5’、X1’、X6’; 用直线依次连接X5’、X1’、X6’,获得羊体腹部对称中心线; 用腹部对称中心线的垂线扫描前景图像,计算垂线在前景图像中的长度N; Ni为N中的最大值;Ni即为腹宽。
4.根据权利要求1所述的方法,其特征在于,所述步骤根据对称中心线拟合曲线和前景图像计算获得体尺测点包括: 前景图像为羊头朝左的俯视图; X1为前景图像质心; 经过图像质心X1的直线m1将前景图像分为左右两区域,X2、X3分别为这两个区域的前景图像的质心; 分别经过X1、X2、X3的直线m1、m2、m3将前景图像划分为4个区域,X4、X5、X6、X7分别对应每块区域质心; 其中m1、m2、m3互相平行; X6、X3、X7分别在垂直映射拟合曲线l1,分别获得垂足X6’、X3’、X7’; 用直线依次连接X6’、X3’、X7’,获得羊体臀部对称中心线; 用臀部对称中心线的垂线扫描前景图像,计算垂线在前景图像中的长度L; 根据长度L制作拟合曲线l3; 拟合曲线l3中曲率最大的点所对应的长度Li,长度Li对应的臀部对称中心线上的点为疑似臀宽测点D;拟合曲线l3对应臀宽测点D到X7’的部分曲线中,最大长度Lx即为臀宽。
5.根据权利要求1所述的方法,其特征在于,所述步骤获得对称中心线拟合曲线l1之前包括步骤: 根据前景图像提取图像骨架,对前景图像中非羊只主骨架的部分进行剪枝。
6.根据权利要求1所述的方法,其特征在于,获得羊只俯视的前景图像的步骤包括: 获取羊只俯视图像; 根据羊只俯视图像,通过图像超像素分割方法获得图像中的图像块的信息; 根据图像块的信息,通过模糊C均值聚类方法获得前景图像。
7.根据权利要求6所述的方法,其特征在于,所述图像超像素分割方法包括步骤: 将彩色图像转换到CIELAB空间, 在图像上均匀初始化K个聚类中心, 对于图像上的每个像素点Yi,逐一分别计算各个聚类中心M和像素点Yi的相似程度D,聚类中心M为像素点Yi周围与之相邻的聚类中心; 将像素点Yi与相似程度D最大的聚类中心Mi归入同一图像块; 依据每一图像块中所有像素的颜色和空间特性dxy的均值,更新聚类中心; 根据更新后的聚类中心,重复计算每个像素点的相似程度D以及更新聚类中心,直至更新后的聚类中心与上一次的聚类中心特征值信息的差异小于预设阈值; 所述相似程度D的计算方式为:  其中,m为平衡参数,
其中,m为平衡参数, 

8.根据权利要求7所述的方法,其特征在于,均匀初始化K个聚类中心的步骤包括: 更新初始化的聚类中心N点到Ni点,Ni点为在以聚类中心N为中心的3×3的窗口内的梯度值最小的像素点;初始化每个聚类中心与类边界的距离近似为 N为图像中的包含的像素个数,K为聚类中心个数; 在步骤更新后的聚类中心与上一次的聚类中心特征值信息的差异小于预设阈值之后,还包括: 合并临近的孤立的小尺寸超像素; 所述合并临近的孤立的小尺寸超像素的具体步骤包括:将所述孤立的小尺寸超像素,与相邻的大尺寸像素或相邻的小尺寸像素合并。
N为图像中的包含的像素个数,K为聚类中心个数; 在步骤更新后的聚类中心与上一次的聚类中心特征值信息的差异小于预设阈值之后,还包括: 合并临近的孤立的小尺寸超像素; 所述合并临近的孤立的小尺寸超像素的具体步骤包括:将所述孤立的小尺寸超像素,与相邻的大尺寸像素或相邻的小尺寸像素合并。
9.根据权利要求6所述的方法,其特征在于,在获得图像中的图像块的信息后,还包括步骤:将图像块的6维特征向量基于主成分分析提取5组特征值;将5组特征值作为模糊C-均值聚类方法的输入; 所述模糊C均值聚类方法包括: 根据输入的5组特征值,获得前景图像; 所述6维特征向量为:  其中lj、aj、bj为超像素分割子块j在CIELAB空间颜色分量;
其中lj、aj、bj为超像素分割子块j在CIELAB空间颜色分量; 为对应点的均衡图像光照后的RGB颜色分量。
为对应点的均衡图像光照后的RGB颜色分量。
请联系平台
请联系平台




