本发明公开了一种自主越障式擦玻璃机器人的越障系统及其机器人,该越障系统包括主机、主吸盘、举升机构、至少两个越障机构以及至少两个支撑机构。主机包括活动连接的机身一和机身二,主吸盘安装在机身二远离机身一的一侧上。举升机构包括伸缩件一,伸缩件一安装在机身二上,且伸缩端连接在机身一上。每个越障机构包括伸缩件二,伸缩件二具有能向远离机身一的方向伸缩的伸缩杆。每个支撑机构包括伸缩件三和真空吸盘组。伸缩件三安装在对应的伸缩杆的自由端上,真空吸盘组安装在伸缩件三的伸缩端上。本发明可以使擦玻璃机器人在无使用人员在场的情况下独自完成对多块玻璃的擦拭工作,提高了机器人的自主性和工作效率,能够保证使用人员的安全。
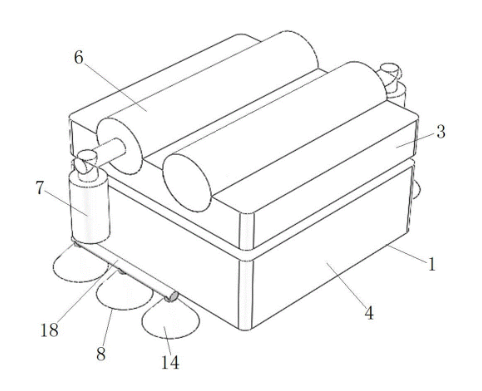
1.一种自主越障式擦玻璃机器人的越障系统,其包括: 主机(1); 主吸盘(2),其安装在主机(1)上,并用于吸附在玻璃上; 其特征在于,主机(1)包括活动连接的机身一(3)和机身二(4);主吸盘(2)安装在机身二(4)远离机身一(3)的一侧上;所述越障系统还包括: 举升机构,其包括伸缩件一(5);伸缩件一(5)安装在机身二(4)上,且伸缩端连接在机身一(3)上; 至少两个越障机构,其分别设置在机身一(3)的相对两侧;每个越障机构包括伸缩件二(6),伸缩件二(6)具有与所述玻璃表面平行且能向远离机身一(3)的方向伸缩的伸缩杆;以及 至少两个支撑机构,其分别与至少两个越障机构对应;每个支撑机构包括伸缩件三(7)和真空吸盘组(8);伸缩件三(7)安装在对应的伸缩杆的自由端上,并与对应的伸缩杆垂直设置;真空吸盘组(8)安装在伸缩件三(7)的伸缩端上,且吸嘴朝向所述玻璃设置; 其中,在所述越障系统从玻璃一翻越障碍物至玻璃二时,主机(1)依次进行以下动作: 动作一:首先,驱动伸缩件一(5)伸出,使机身一(3)远离机身二(4),直至机身一(3)移动的距离大于所述障碍物的高度;其次,驱动靠近所述障碍的伸缩件二(6)伸缩,使对应的伸缩杆伸出;然后,驱使两个伸缩件三(7)同时伸出,使对应的两个真空吸盘组(8)分别吸附在所述玻璃一和所述玻璃二上;最后,使主吸盘(2)停止吸附所述玻璃一; 动作二:先驱动伸缩件一(5)收缩,使机身一(3)和机身二(4)复位,再驱使已翻越所述障碍物的伸缩件二(6)收缩,并驱使另一个伸缩件二(6)伸出,使两个伸缩件二(6)的伸缩作用力驱使主机(1)翻越所述障碍物; 动作三:首先,驱动伸缩件一(5)伸出,使主吸盘(2)吸附在所述玻璃二上;然后,使两个真空吸盘组(8)停止吸附,并驱动伸缩件三(7)收缩,使两个真空吸盘组(8)分别脱离所述玻璃一和所述玻璃二;最后,驱使另一个伸缩件二(6)收缩,使对应的真空吸盘组(8)翻越所述障碍物。
2.如权利要求1所述的自主越障式擦玻璃机器人的越障系统,其特征在于,伸缩件一(5)、伸缩件二(6)以及伸缩件三(7)均为气缸;所述越障系统还包括: 主电磁阀(16),其用于启闭主吸盘(2); 其中,所述举升机构还包括用于启闭伸缩件一(5)的电磁阀一(9);每个还包括用于启闭对应的伸缩件二(6)的电磁阀二(10);每个支撑机构还包括用于启闭对应的伸缩件三(7)的电磁阀三(11)以及用于启闭对应的真空吸盘组(8)的电磁阀四(17);主机(1)通过控制主电磁阀(16)、电磁阀一(9)、至少两个电磁阀二(10)、至少两个电磁阀三(11)以及至少两个电磁阀四(17)实现所述动作一、所述动作二以及所述动作三。
3.如权利要求2所述的自主越障式擦玻璃机器人的越障系统,其特征在于,所述越障系统还包括: 真空源(12),其用于向伸缩件一(5)、伸缩件二(6)、伸缩件三(7)、主吸盘(2)以及真空吸盘组(8)提供真空气压; 过滤器(13),其用于滤除从伸缩件一(5)、伸缩件二(6)、伸缩件三(7)、主吸盘(2)以及真空吸盘组(8)吸入的空气中的颗粒物。
4.如权利要求3所述的自主越障式擦玻璃机器人的越障系统,其特征在于,真空源(12)为真空泵;过滤器(13)通过多根硅胶管分别连通真空源(12)、主电磁阀(16)、电磁阀一(9)、电磁阀二(10)以及电磁阀三(11);主吸盘(2)与主电磁阀(16)连通,伸缩件一(5)与电磁阀一(9)连通,伸缩件二(6)与对应的电磁阀二(10)连通,伸缩件三(7)与对应的电磁阀三(11)连通,电磁阀四(17)与对应的真空吸盘组(8)连通。
5.如权利要求1所述的自主越障式擦玻璃机器人的越障系统,其特征在于,每个真空吸盘组(8)包括吸盘支架(18)和三个副吸盘(14);吸盘支架(18)固定在对应的伸缩杆的自由端上;三个副吸盘(14)通过三根硅胶管相互连通,并固定在吸盘支架(18)上。
6.如权利要求5所述的自主越障式擦玻璃机器人的越障系统,其特征在于,三个副吸盘(14)呈线型排布,且相邻的两个副吸盘(14)的间距为125mm。
7.如权利要求5所述的自主越障式擦玻璃机器人的越障系统,其特征在于,主电磁阀(16)、电磁阀一(9)、电磁阀二(10)以及电磁阀三(11)均为二位三通电磁阀;副吸盘(14)的吸附半径小于主吸盘(2)的吸附半径,所有副吸盘(14)的吸附总面积不小于主吸盘(2)的吸附面积。
8.如权利要求1所述的自主越障式擦玻璃机器人的越障系统,其特征在于,伸缩件一(5)、伸缩件二(6)以及伸缩件三(7)均为电动推杆;主机(1)还包括控制器,所述控制器用于实现所述动作一、所述动作二以及所述动作三。
9.如权利要求1所述的自主越障式擦玻璃机器人的越障系统,其特征在于,所述越障系统还包括: 多个测距传感器(15),其环绕安装在主机(1)的外壁上,并用于检测主机(1)与所述障碍物的间距;在测距传感器(15)检测的间距小于一个预设距离时,主机(1)依次进行所述动作一、所述动作二以及所述动作三。
10.一种自主越障式擦玻璃机器人,其特征在于,其包括如权利要求1-9中任意一项所述的自主越障式擦玻璃机器人的越障系统。
请联系平台
请联系平台




