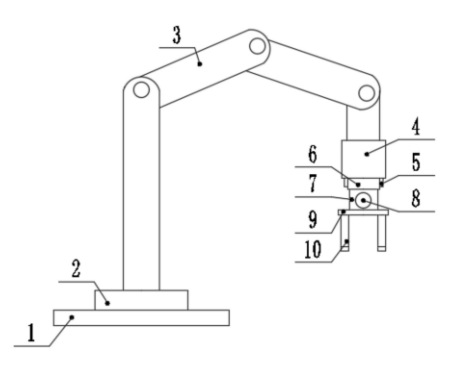
本实用新型涉及一种搬运机械手,包括机械臂,所述机械臂顶端固定连接了安装筒,安装筒内部滑动连接了拆卸圆柱,拆卸圆柱下端设置了夹持机构,所述安装筒内部两侧均开设了定位滑槽,定位滑槽内部滑动连接了与拆卸圆柱表面固定连接的定位板,所述拆卸圆柱后端表面开设了两个定位孔,所述安装筒后端表面固定连接了安装框,安装框内部滑动连接了移动板二,移动板二一面固定连接了两个均贯穿安装筒并与贯穿部位滑动连接的定位柱,定位柱与相对应的定位孔内部滑动连接。本实用新型所述的一种搬运机械手,便于使夹持部位与机械臂之间进行拆卸处理,防止后续损坏无法更换进而会影响机械臂的正常使用,提高了实用性。
1.一种搬运机械手,包括机械臂(3),其特征在于,所述机械臂(3)顶端固定连接了安装筒(4),安装筒(4)内部滑动连接了拆卸圆柱(6),拆卸圆柱(6)下端设置了夹持机构,所述安装筒(4)内部两侧均开设了定位滑槽(21),定位滑槽(21)内部滑动连接了与拆卸圆柱(6)表面固定连接的定位板(5),所述拆卸圆柱(6)后端表面开设了两个定位孔(15),所述安装筒(4)后端表面固定连接了安装框(11),安装框(11)内部滑动连接了移动板二(17),移动板二(17)一面固定连接了两个均贯穿安装筒(4)并与贯穿部位滑动连接的定位柱(16),定位柱(16)与相对应的定位孔(15)内部滑动连接,所述移动板二(17)另一面固定连接了两个均贯穿安装框(11)并与贯穿部位滑动连接的拉杆(12),拉杆(12)一端固定连接了拉板(13),所述拉杆(12)表面滑动连接了两端分别与安装框(11)内部一端和移动板二(17)另一面固定连接的弹簧(18)。
2.根据权利要求1所述一种搬运机械手,其特征在于,所述机械臂(3)底端设置了旋转台(2),旋转台(2)下端设置了底座(1)。
3.根据权利要求1所述一种搬运机械手,其特征在于,所述夹持机构包括与拆卸圆柱(6)下端固定连接的限位滑框(7),限位滑框(7)内部设置了两个均与限位滑框(7)内部滑动连接的螺纹滑块(20)。
4.根据权利要求3所述一种搬运机械手,其特征在于,两个所述螺纹滑块(20)下端均固定连接了与限位滑框(7)滑动连接的移动板一(9),移动板一(9)下端固定连接了两个竖板(10)。
5.根据权利要求4所述一种搬运机械手,其特征在于,每个所述竖板(10)下端均固定连接了托板(14),所述限位滑框(7)一端固定连接了双向电机(8)。
6.根据权利要求5所述一种搬运机械手,其特征在于,所述双向电机(8)输出端固定连接了贯穿限位滑框(7)并与贯穿部位转动连接的旋转轴,旋转轴一端固定连接了贯穿两个所述螺纹滑块(20)并与贯穿部位螺纹连接的双向丝杆(19)。
请联系平台
请联系平台




