本发明涉及一种基于GPS‑RTK技术的平地机人工辅助自动找平装置,该装置采用了两个分别安装在铲刀左右两端的左侧和右侧铲刀刃角位置GPS‑RTK传感器,以及一个安装在牵引架中部的铲刀倾角传感器对铲刀进行定位,配合驾驶员的辅助操控,使平地机在人工驾驶的状态下对具有纵横坡度的“待平整面”进行自动平整;本装置还可对作业基准线预设高程,并对暂停车处的临时性起始桩点的桩点参数进行暂存,使平地机可以在临时性起始桩点处重复起步,即可继续暂停车前的平整作业,也可通过启用新的控制线程,对局部路段进行自动找平处理,实现多层次和层层精平整的自动找平作业,扩大了平地机的应用范围,增强了其适用性。
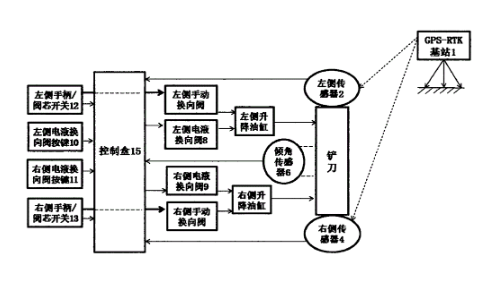
1.一种基于GPS-RTK技术的平地机人工辅助自动找平装置,其特征在于:它由以下15部分组成,它们分别是GPS-RTK基站(1),左侧铲刀刃角位置GPS-RTK传感器(以下简称左侧传感器)(2),左侧铲刀刃角位置GPS-RTK传感器支架(以下简称左侧传感器支架)(3),右侧铲刀刃角位置GPS-RTK传感器(以下简称右侧传感器)(4),右侧铲刀刃角位置GPS-RTK传感器支架(以下简称右侧传感器支架)(5),铲刀横向倾角传感器(以下简称倾角传感器)(6),倾角传感器支架(7),左侧铲刀升降油缸电磁比例液压换向阀(以下简称左侧电液换向阀)(8),右侧铲刀升降油缸电磁比例液压换向阀(以下简称右侧电液换向阀)(9),左侧铲刀升降油缸电液换向阀手动按钮或按键或摇杆(以下简称左侧电液换向阀按键)(10),右侧铲刀升降油缸电液换向阀手动按钮或按键或摇杆(以下简称右侧电液换向阀按键)(11),左侧铲刀升降油缸手动换向阀阀芯行程开关(以下简称左侧手动换向阀行程开关)(12)和右侧铲刀升降油缸手动换向阀阀芯行程开关(以下简称右侧手动换向阀行程开关)(13),控制面板(14)和控制盒(15);所述的左侧传感器(2)或右侧传感器(4)可以与GPS-RTK基站(1)直接无线连接,也可以与CORS站或GPS-RTK卫星站直接无线连接;所述的左侧传感器(2)、控制盒(15)和左侧电液换向阀(8)连接,构成铲刀左侧对比铲刀刃角点高程(简称对比刀点)自动找平控制单元,而右侧传感器(4)、控制盒(15)和右侧电液换向阀(9)连接,则构成铲刀右侧对比刀点自动找平控制单元;所述的倾角传感器(6)、控制盒(15)和左侧电液换向阀(8)连接,构成铲刀左侧对比铲刀横向倾角(简称对比刀角)自动找平控制单元,而倾角传感器(6)、控制盒(15)和右侧电液换向阀(9)连接,则构成铲刀右侧对比刀角自动找平控制单元;当选择铲刀任意一侧作为对比刀点控制侧时,该侧为人工驾驶寻迹侧,也为半自动找平时的手动升降铲刀侧,另一侧则为对比刀角控制侧;所述的左侧电液换向阀按键(10)、控制盒(15)和左侧电液换向阀(8)连接,构成左侧手动高程电液控制单元,而右侧电液换向阀按键(11)、控制盒(15)和右侧电液换向阀(9)连接,则构成右侧手动高程电液控制单元,该左侧和右侧手动高程电液控制单元主要用于平地机入线时的高程对刀作业;所述的左侧手动换向阀行程开关(12)及其联动的左侧手动换向阀与控制盒(15)连接,构成有开关信号输出的左侧手动高程控制单元,而右侧手动换向阀行程开关(13)及其联动的右侧手动换向阀与控制盒(15)连接,则构成有开关信号输出的右侧手动高程控制单元,该左侧和右侧手动高程控制单元输出的开关电信号主要用于平地机走刀行程结束时引导系统结束控制程序的运行;所述各组成部分或其中某一部分的内部各零部件之间,通过各类接口与接头,插座与插头,以有线或无线的方式连接;系统工作前需要做5项初始化准备工作,其内容包括: 准备1:将作业基准线上各桩点的桩点参数包括平面坐标Ki(xi,yi)及其坐标方位角Ki(ci)、高程Ki(zi)和横坡度Ki(si)数据输入系统:通过控制面板(14)上的键盘输入或U盘将作业基准线上的桩点参数,包括增补作业基准线上的增补桩点参数采录到控制盒(15)中,需要说明的是,桩点参数中的坐标方位角和横坡度数据具有方向性,逆向作业时需要做相应的处理,起终点及桩点编号需要另行定义;一个矩形的作业基准面一般可用纵向平行且桩点数相同的两条作业基准线表示,就本装置采用的拼接式自动找平作业方式而言,在作业面的横向上,需要视具体工况在施工图设计文件给出的诸如道路中线、左右对称的左边线和右边线之间,增设增补作业基准线,其间距以1m的整倍数为宜;而在作业面纵向的每条作业基准线上,需要对所有桩点的桩间距数据进行加密,桩间距数值越小,算法误差越小,平整精度越高,若以公路最大纵坡为5%和桩间距取0.5m计算,并不考虑系统响应滞后产生的误差,本算法可将误差控制在15mm以内;此外,平地机作业行驶速度越高,系统控制频率应越高,当平地机作业行驶速度为20km/h时,系统控制频率应≥12hz;所述桩点参数的采录,最好借助于诸如公路施工测量坐标计算系统等软件工具对其进行预处理,或在施工图设计时,委托设计单位对施工图设计文件的相关内容预先进行细化设计,或自行设计加密桩点参数的软件系统对增补加密的桩点参数进行预先解算,之后再进行增补桩点参数的采录工作;当道路具有中间高两边低的路拱时,为了便于桩点横坡度的标记,道路的中线桩应区分为左中桩和右中桩,以便区分横坡度的正负号,当定义以中线桩为基准,水平坡的横坡度值为0,左倾坡或逆时针旋转的角度为正,右倾坡或顺时针旋转的角度为负时,作业行驶方向改变,横坡度值的正负号需要改变;当逆向作业时,坐标方位角则需要将顺向坐标方位角±180°;需将一条作业基准线上桩点的平面坐标通过打桩或打灰点的方式标记在待平整地面上,供驾驶员追寻轨迹使用;对某一作业面进行多层次施工时,只需依次将作业基准线上所有相关桩点参数中的高程值增加一个增量即可; 准备2:左侧传感器(2)和右侧传感器(4)的初始坐标转换参数值的设定:通过二者本身的键盘或控制面板(14)上的键盘,将测量好的左侧传感器(2)和右侧传感器(4)上的对中杆长度与对中杆末端至铲刀刃角点连线长度二者之和作为初始坐标转换参数值,输入到左侧传感器(2)和右侧传感器(4)中; 准备3:左侧传感器(2)、右侧传感器(4)和倾角传感器(6)的动态输出信号的刷新频率设定:需根据平地机行驶速度或档位,以及相应的电液控制系统响应时间和平整度要求进行选择和设置,并应与自动找平控制系统的循环控制频率或周期相匹配,一般而言,平地机每行进一段0.1m-1.0m的距离,在相应的时间内,左侧传感器(2)、右侧传感器(4)和倾角传感器(6)应至少分别输出一组或一个更新的桩点参数的信号,以便控制系统可以执行一个纠偏动作; 准备4:左侧传感器(2)、右侧传感器(4)和倾角传感器(6)初始位置的校准和标定:在较为平坦的作业场地的起始区域,将编号相同的左边桩与右边桩的连线撒上灰作为起始作业线,选择两条横向间距小于铲刀长度并与起始作业线相交的一段作业基准线,依照桩点的平面坐标将这两条作业基准线打上桩或灰点,再将起始作业线上的两个桩或灰点改做成砖面上撒灰的砖灰点,砖灰点的带灰砖面高程即为该桩点的高程;将平地机铲刀回正(其长度方向与行驶方向垂直或铲刀水平回转角为0°),并将铲刀切削角调整到工作位,机身纵向与已经标记的作业基准线平行,人工驾驶平地机分左右两次入线,每次在到达起始作业线时,停车并将铲刀落在两个砖灰点上,通过将铲刀刃角落在砖灰点上进行对中的方式,依次进行左侧传感器(2)和右侧传感器(4)的校准和标定,同时进行倾角传感器(6)的校准和标定;校准和标定的具体方法是:分别调整左侧传感器支架(3)、右侧传感器支架(5)和倾角传感器支架(7),使其中的左侧传感器(2)和右侧传感器(4)的对中杆保持与水平地面垂直并过铲刀刃角点,使其中的倾角传感器(6)的安装平面与地面平行,且其倾角轴线与牵引架纵向中线平行,调至当左侧传感器(2)、右侧传感器(4)和倾角传感器(6)所输出或显示出的数值与该桩点的桩点参数值相符时,将所述左侧传感器支架(3)、右侧传感器支架(5)和倾角传感器支架(7)的活动连接部分进行锁定; 准备5:作业条件的限定:驾驶员通过控制面板(14)上的按键,可以对作业条件和左右侧对刀进行设定,以便引导程序的运行和简化程序运行的细步,同时可以明晰作业状态,方便驾驶员操作;为便于叙述,假设的作业条件为:作业面为左倾坡;作业线位于测量坐标系(上/北x轴-右/东y轴)的第一象限、作业线上桩点编号的顺序同里程桩一致,自左向右顺向作业,坐标方位角0°<ci<90°,方向为右上;采用铲刀左侧对比刀点对刀;需要说明的是,如果作业条件和对刀侧发生改变,下述步骤中的相关算法需要做出相应的调整,由于它们的控制原理和过程相同,程序中相应的子循环语句或子循环段落的结构相同,不再赘述;本项准备工作的操作过程为:在起始作业线上,可以通过摆放砖灰点或打桩的方式将起始桩点Ki(xi,yi,zi)放样;驾驶员可以借助于GPS-RTK传感器输出的定位信息,通过控制面板(14)上的菜单键和选择确认键,配合屏幕上的可以是网格形作业基准线图解界面所显示的节点位置及其坐标数值,进行起始桩点Ki(xi,yi,zi)坐标值地址的确认;需要说明的是,所述的选择确认键,可以采用外圈为轮盘键与中心为按键的组合形式,预设高程的选择确认键,其外圈轮盘键顺时针或逆时针转动一档,Lj上所有桩点的Ki(zi)的zi值可以增或减10mm,即级差可以为±10mm,当预设高程组合键有选项时,系统自动在当前作业基准线Lj所有桩点的Ki(zi)上加减一个主观的高程偏差值Δz,形成当前的作业基准线Lj;当驾驶员通过操作平地机前后移动以及操作铲刀左右移动的方式,依次完成入线、将铲刀左侧刃角点放在放样桩点上或放在比放样桩点超前的位置上进行对中或对刀,以及操作平地机起步以后,再在控制面板(14)上按亮自动找平键,系统进入自动控制状态;本基于GPS-RTK技术的平地机人工辅助自动找平装置的工作循环分为以下21个步骤: 步骤1:给出发桩点Ks(xi,yi)与到达桩点Ke(xi+1,yi+1)赋值:当人工确认起始桩点Ki(xi,yi)坐标值地址,并将铲刀左侧刃角点与放样桩点对中后,系统定义该对中桩点为出发桩点Ks,定义沿作业方向的下一个桩点为到达桩点Ke;系统读取对中桩点Ki(xi,yi)的xi,yi赋值给Ks(xi,yi),读取Ki+1(xi+1,yi+1)的xi+1,yi+1赋值给Ke(xi+1,yi+1);其中i为桩点编号,可以为1,2,3…n,输入桩点参数时可以与里程桩号的顺序对应起来,如对应的里程桩号可以为K12+131.88,K12+141.88,K12+151.88,K12+161.88…n;j为作业基准线编号,可以为1,2,3…m,作业基准线Lj上桩点编号的排列顺序即为作业顺序,该顺序决定平地机的作业方向,构成Lj的桩点路径为1→2→3→…→n,本步骤假设为升序排列;x,y的下角标编号取+号时代表顺向作业,反向施工时取-号; 步骤2:判定左侧传感器(2)输出的即时点坐标Pa(xa,ya)是否在a区域:系统定义Pa(xa,ya)为左侧传感器(2)或右侧传感器(4)输出的即时点的坐标;系统读取的左侧传感器(2)输出的即时点Pa(xa,ya)的平面坐标xa,ya与出发桩点Ks(xi,yi)的平面坐标xi,yi并进行对比,如果判别式xa≥xi且ya≤yi不成立,系统执行步骤5;如果所述判别式成立,系统执行下一步;需要说明的是,Pa(xa,ya)会分布在线段Ks(xi,yi)Ke(xi+1,yi+1)附近的a-e共5块区域中,系统需要在每块区域中循环执行Pa(xa,ya)所在区域判定、Pa(za)高程偏差Δz计算和纠偏控制三个步骤; 步骤3:确定Pa(xa,ya,za)点的高程偏差Δz:系统读取Pa(za)和Ks(zi)的高程值za和zi,并计算za-zi,得Pa(xa,ya,za)点的高程偏差Δz=za-zi;如果Δz的计算结果为正值,即判别式Δz>0成立,Δz为上偏差;如果Δz的计算结果为负值,即判别式Δz<0成立,Δz为下偏差;本例假设Δz为上偏差; 步骤4:系统根据对刀侧的高程偏差Δz进行高程纠偏控制:本例的Δz=za-zi假设为正值,即判别式za>zi成立,系统根据Δz向左侧电液换向阀(8)发出一个下落油缸的控制指令,该纠偏指令可以是PWM或是脉冲频率调制的比例脉冲控制信号,需要结合实验确定该控制信号的量化值,下同;反之,如果Δz=za-zi为负值,判别式za<zi成立,则系统根据Δz向左侧电液换向阀(8)发出一个提升油缸的控制指令;如果za=zi,系统不动作;接下来系统执行步骤19; 步骤5:判定左侧传感器(2)输出的即时点坐标Pa(xa,ya)是否在b区域:系统根据已读取的左侧传感器(2)输出的即时点Pa(xa,ya)的平面坐标xa,ya与出发桩点Ks(xi,yi)的平面坐标xi,yi进行对比,如果判别式xa≤xi且ya≥yi不成立,系统执行步骤8;如果所述判别式成立,系统执行下一步; 步骤6:确定Pa(xa,ya,za)点的高程偏差Δz:系统读取Pa(za)和Ks(zi)的高程值za和zi,并计算za-zi,得Pa(xa,ya,za)点的高程偏差Δz=za-zi;如果Δz的计算结果为正值,即判别式Δz>0成立,Δz为上偏差;如果Δz的计算结果为负值,即判别式Δz<0成立,Δz为下偏差;本例假设Δz为上偏差; 步骤7:系统根据对刀侧的高程偏差Δz进行高程纠偏控制:本例的Δz=za-zi假设为正值,即判别式za>zi成立,系统根据Δz向左侧电液换向阀(8)发出一个下落油缸的控制指令;反之,如果Δz=za-zi为负值,判别式za<zi成立,则系统根据Δz向左侧电液换向阀(8)发出一个提升油缸的控制指令;如果za=zi,系统不动作;接下来系统执行步骤19; 步骤8:判定左侧传感器(2)输出的即时点坐标Pa(xa,ya)是否在c区域:系统根据已读取的左侧传感器(2)输出的即时点Pa(xa,ya)的坐标值与出发桩点Ks(xi,yi)和到达桩点Ke(xi+1,yi+1)的坐标值进行对比,如果判别式xa>xi且ya>yi且xa<xi+1且ya<yi+1不成立,系统执行步骤11;如果所述判别式成立,系统执行下一步; 步骤9:确定Pa(xa,ya,za)点的高程偏差Δz:系统读取Pa(za)、Ks(zi)和Ks(zi+1)的高程值za、zi和zi+1,并计算 得Pa(xa,ya,za)点的高程偏差/>
得Pa(xa,ya,za)点的高程偏差/> 如果Δz的计算结果为正值,即判别式Δz>0成立,Δz为上偏差;如果Δz的计算结果为负值,即判别式Δz<0成立,Δz为下偏差;本例假设Δz为上偏差; 步骤10:系统根据对刀侧的高程偏差Δz进行高程纠偏控制:本步骤的
如果Δz的计算结果为正值,即判别式Δz>0成立,Δz为上偏差;如果Δz的计算结果为负值,即判别式Δz<0成立,Δz为下偏差;本例假设Δz为上偏差; 步骤10:系统根据对刀侧的高程偏差Δz进行高程纠偏控制:本步骤的 假设为正值,即判别式za>zi成立,系统根据Δz向左侧电液换向阀(8)发出一个下落油缸的控制指令;反之,如果Δz=za-zi为负值,判别式za<zi成立,则系统根据Δz向左侧电液换向阀(8)发出一个提升油缸的控制指令;如果za=zi,系统不动作;接下来系统执行步骤19; 步骤11:判定左侧传感器(2)输出的即时点坐标Pa(xa,ya)是否在d区域:系统根据已读取的左侧传感器(2)输出的即时点Pa(xa,ya)的平面坐标xa,ya与到达桩点Ke(xi+1,yi+1)的平面坐标xi+1,yi+1进行对比,如果判别式xa≥xi+1且ya≤yi+1不成立,系统执行步骤15;如果所述判别式成立,系统执行下一步; 步骤12:确定Pa(xa,ya,za)点的高程偏差Δz:系统读取Pa(za)和Ks(zi+1)的高程值za和zi+1,并计算za-zi+1,得Pa(xa,ya,za)点的高程偏差Δz=za-zi+1;如果Δz的计算结果为正值,即判别式Δz>0成立,Δz为上偏差;如果Δz的计算结果为负值,即判别式Δz<0成立,Δz为下偏差;本例假设Δz为上偏差; 步骤13:系统根据对刀侧的高程偏差Δz进行高程纠偏控制:本例的Δz=za-zi+1假设为正值,即判别式za>zi+1成立,系统根据Δz向左侧电液换向阀(8)发出一个下落油缸的控制指令;反之,如果Δz=za-zi+1为负值,判别式za<zi+1成立,则系统根据Δz向左侧电液换向阀(8)发出一个提升油缸的控制指令;如果za=zi+1,系统不动作; 步骤14:重新给出发桩点Ks(xi,yi)与到达桩点Ke(xi+1,yi+1)赋值:系统需重新定义出发桩点Ks(xi,yi)和到达桩点Ke(xi+1,yi+1),系统将Ki+1(xi+1,yi+1)的坐标值赋值为新的出发桩点Ks(xi,yi)的坐标值,同时读取桩点Ki+2(xi+2,yi+2)的坐标值,并将其赋值为新的到达桩点Ke(xi+1,yi+1)的坐标值;系统接下来执行步骤19; 步骤15:判定左侧传感器2输出的即时点坐标Pa(xa,ya)是否在e区域:系统根据已读取的左侧传感器2输出的即时点Pa(xa,ya)的平面坐标xa,ya与到达桩点Ke(xi+1,yi+1)的平面坐标xi+1,yi+1进行对比,如果判别式xa≤xi+1且ya≥yi+1不成立,说明系统经过一轮循环判定,Pa(xa,ya)已不在所有的a、b、c、d和e区域,系统执行步骤18;如果所述判别式成立,系统执行下一步; 步骤16:确定Pa(xa,ya,za)点的高程偏差Δz:系统读取Pa(za)和Ks(zi+1)的高程值za和zi+1,并计算za-zi+1,得Pa(xa,ya,za)点的高程偏差Δz=za-zi+1;如果Δz的计算结果为正值,即判别式Δz>0成立,Δz为上偏差;如果Δz的计算结果为负值,即判别式Δz<0成立,Δz为下偏差;本例假设Δz为上偏差; 步骤17:系统根据对刀侧的高程偏差Δz进行高程纠偏控制:本例的Δz=za-zi+1假设为正值,即判别式za>zi+1成立,系统根据Δz向左侧电液换向阀(8)发出一个下落油缸的控制指令;反之,如果Δz=za-zi+1为负值,判别式za<zi+1成立,则系统根据Δz向左侧电液换向阀(8)发出一个提升油缸的控制指令;如果za=zi+1,系统不动作; 步骤18:重新给出发桩点Ks(xi,yi)与到达桩点Ke(xi+1,yi+1)赋值:系统需重新定义出发桩点Ks(xi,yi)和到达桩点Ke(xi+1,yi+1),系统将Ki+1(xi+1,yi+1)的坐标值赋值为新的出发桩点Ks(xi,yi)的坐标值,同时读取桩点Ki+2(xi+2,yi+2)的坐标值,并将其赋值为新的到达桩点Ke(xi+1,yi+1)的坐标值; 步骤19:系统根据铲刀对比刀角侧的横坡度偏差Δs进行横坡度纠偏控制:系统定义并读取倾角传感器(6)的即时横坡度值Aa(sa),用其与出发桩点横坡度值Ks(si)并进行比对,按前述假设的左倾坡作业,如果Δs=sa-si为负值,判别式sa<si成立,系统根据Δs向右侧电液换向阀(9)发出一个下落油缸的控制指令;反之,如果Δs=sa-si为正值,sa>si,系统根据Δs向右侧电液换向阀(9)发出一个提升油缸的控制指令;右倾坡的纠偏控制原理相同,不再复述; 步骤20:驾驶员操作休眠键使系统的控制程序产生中断或暂停和重启:当平地机采用分层找平作业方式进行首次找平(以下简称荒平)作业时,会出现遇阻不能行进的情况,此时驾驶员的操作方法是:按亮控制面板(14)上的休眠键指示灯的同时停车,此时自动找平键自动关闭即其指示灯熄灭→将铲刀对刀点在地面上的位置作为临时性起始桩点标记在对刀侧的作业轨迹线上或其旁侧→通过手动、半自动或可预设高程的自动找平方式处理遇阻凸起路段→重新参照原Lj线的作业轨迹入线,参照临时性起始桩点标记对刀→平地机起步,按灭休眠键指示灯,同时按下自动找平键,继续原来的走刀行程;系统的控制过程是:系统读取到休眠键的电信号时,依次执行程序中断或暂停和保存即时点的相关运行数据的指令,使系统进入休眠状态,将暂停车处的临时性起始桩点参数进行保存后,新增加一个起始桩点;此时需要设定相关按键的联动动作是,控制面板(14)上的自动找平键关闭即指示灯灭;当驾驶员以临时性起始桩点为对刀点起车时,系统还可设定启动一个新的控制线程,以便可以采用预设高程的自动找平方式处理遇阻凸起路段,此时需要再按亮自动找平键;当驾驶员以临时性起始桩点为对刀点起车,继续原来的走刀行程时,只需按灭休眠键指示灯,系统随即执行解除中断或暂停指令,继续执行原来的控制程序或进程;如果系统没有读取到休眠键的电信号,执行下一步; 步骤21:驾驶员双手动提升铲刀动作使系统结束控制程序的运行:系统如果没有读取到手动端的联动电磁脉冲或电信号,包括左侧电液换向阀按键(10)和右侧电液换向阀按键(11)触发的联动的提升铲刀的电磁脉冲信号,以及左侧手动换向阀行程开关(12)和右侧手动换向阀行程开关(13)触发的联动的提升铲刀的电信号,系统回到并执行步骤1;如果读取到了所述双手动端的联动电磁脉冲或电信号,系统结束控制程序的运行;需要说明的是,当驾驶员按下控制面板(14)上的半自动找平键时,系统可处于半自动找平模式,其控制步骤只需执行所述找平装置工作循环的21个步骤中的步骤1、2、5、8、11、14、15、18、19、20和21;半自动找平模式主要适用于在没有GPS-RTK信号时的场合,驾驶员在操作时需在控制面板(14)上通过按键预先选定铲刀的某一侧为对刀寻迹侧,该侧也被设定为凭经验进行半自动找平的手动控制侧,另一侧则为对比刀角的自动控制侧。
假设为正值,即判别式za>zi成立,系统根据Δz向左侧电液换向阀(8)发出一个下落油缸的控制指令;反之,如果Δz=za-zi为负值,判别式za<zi成立,则系统根据Δz向左侧电液换向阀(8)发出一个提升油缸的控制指令;如果za=zi,系统不动作;接下来系统执行步骤19; 步骤11:判定左侧传感器(2)输出的即时点坐标Pa(xa,ya)是否在d区域:系统根据已读取的左侧传感器(2)输出的即时点Pa(xa,ya)的平面坐标xa,ya与到达桩点Ke(xi+1,yi+1)的平面坐标xi+1,yi+1进行对比,如果判别式xa≥xi+1且ya≤yi+1不成立,系统执行步骤15;如果所述判别式成立,系统执行下一步; 步骤12:确定Pa(xa,ya,za)点的高程偏差Δz:系统读取Pa(za)和Ks(zi+1)的高程值za和zi+1,并计算za-zi+1,得Pa(xa,ya,za)点的高程偏差Δz=za-zi+1;如果Δz的计算结果为正值,即判别式Δz>0成立,Δz为上偏差;如果Δz的计算结果为负值,即判别式Δz<0成立,Δz为下偏差;本例假设Δz为上偏差; 步骤13:系统根据对刀侧的高程偏差Δz进行高程纠偏控制:本例的Δz=za-zi+1假设为正值,即判别式za>zi+1成立,系统根据Δz向左侧电液换向阀(8)发出一个下落油缸的控制指令;反之,如果Δz=za-zi+1为负值,判别式za<zi+1成立,则系统根据Δz向左侧电液换向阀(8)发出一个提升油缸的控制指令;如果za=zi+1,系统不动作; 步骤14:重新给出发桩点Ks(xi,yi)与到达桩点Ke(xi+1,yi+1)赋值:系统需重新定义出发桩点Ks(xi,yi)和到达桩点Ke(xi+1,yi+1),系统将Ki+1(xi+1,yi+1)的坐标值赋值为新的出发桩点Ks(xi,yi)的坐标值,同时读取桩点Ki+2(xi+2,yi+2)的坐标值,并将其赋值为新的到达桩点Ke(xi+1,yi+1)的坐标值;系统接下来执行步骤19; 步骤15:判定左侧传感器2输出的即时点坐标Pa(xa,ya)是否在e区域:系统根据已读取的左侧传感器2输出的即时点Pa(xa,ya)的平面坐标xa,ya与到达桩点Ke(xi+1,yi+1)的平面坐标xi+1,yi+1进行对比,如果判别式xa≤xi+1且ya≥yi+1不成立,说明系统经过一轮循环判定,Pa(xa,ya)已不在所有的a、b、c、d和e区域,系统执行步骤18;如果所述判别式成立,系统执行下一步; 步骤16:确定Pa(xa,ya,za)点的高程偏差Δz:系统读取Pa(za)和Ks(zi+1)的高程值za和zi+1,并计算za-zi+1,得Pa(xa,ya,za)点的高程偏差Δz=za-zi+1;如果Δz的计算结果为正值,即判别式Δz>0成立,Δz为上偏差;如果Δz的计算结果为负值,即判别式Δz<0成立,Δz为下偏差;本例假设Δz为上偏差; 步骤17:系统根据对刀侧的高程偏差Δz进行高程纠偏控制:本例的Δz=za-zi+1假设为正值,即判别式za>zi+1成立,系统根据Δz向左侧电液换向阀(8)发出一个下落油缸的控制指令;反之,如果Δz=za-zi+1为负值,判别式za<zi+1成立,则系统根据Δz向左侧电液换向阀(8)发出一个提升油缸的控制指令;如果za=zi+1,系统不动作; 步骤18:重新给出发桩点Ks(xi,yi)与到达桩点Ke(xi+1,yi+1)赋值:系统需重新定义出发桩点Ks(xi,yi)和到达桩点Ke(xi+1,yi+1),系统将Ki+1(xi+1,yi+1)的坐标值赋值为新的出发桩点Ks(xi,yi)的坐标值,同时读取桩点Ki+2(xi+2,yi+2)的坐标值,并将其赋值为新的到达桩点Ke(xi+1,yi+1)的坐标值; 步骤19:系统根据铲刀对比刀角侧的横坡度偏差Δs进行横坡度纠偏控制:系统定义并读取倾角传感器(6)的即时横坡度值Aa(sa),用其与出发桩点横坡度值Ks(si)并进行比对,按前述假设的左倾坡作业,如果Δs=sa-si为负值,判别式sa<si成立,系统根据Δs向右侧电液换向阀(9)发出一个下落油缸的控制指令;反之,如果Δs=sa-si为正值,sa>si,系统根据Δs向右侧电液换向阀(9)发出一个提升油缸的控制指令;右倾坡的纠偏控制原理相同,不再复述; 步骤20:驾驶员操作休眠键使系统的控制程序产生中断或暂停和重启:当平地机采用分层找平作业方式进行首次找平(以下简称荒平)作业时,会出现遇阻不能行进的情况,此时驾驶员的操作方法是:按亮控制面板(14)上的休眠键指示灯的同时停车,此时自动找平键自动关闭即其指示灯熄灭→将铲刀对刀点在地面上的位置作为临时性起始桩点标记在对刀侧的作业轨迹线上或其旁侧→通过手动、半自动或可预设高程的自动找平方式处理遇阻凸起路段→重新参照原Lj线的作业轨迹入线,参照临时性起始桩点标记对刀→平地机起步,按灭休眠键指示灯,同时按下自动找平键,继续原来的走刀行程;系统的控制过程是:系统读取到休眠键的电信号时,依次执行程序中断或暂停和保存即时点的相关运行数据的指令,使系统进入休眠状态,将暂停车处的临时性起始桩点参数进行保存后,新增加一个起始桩点;此时需要设定相关按键的联动动作是,控制面板(14)上的自动找平键关闭即指示灯灭;当驾驶员以临时性起始桩点为对刀点起车时,系统还可设定启动一个新的控制线程,以便可以采用预设高程的自动找平方式处理遇阻凸起路段,此时需要再按亮自动找平键;当驾驶员以临时性起始桩点为对刀点起车,继续原来的走刀行程时,只需按灭休眠键指示灯,系统随即执行解除中断或暂停指令,继续执行原来的控制程序或进程;如果系统没有读取到休眠键的电信号,执行下一步; 步骤21:驾驶员双手动提升铲刀动作使系统结束控制程序的运行:系统如果没有读取到手动端的联动电磁脉冲或电信号,包括左侧电液换向阀按键(10)和右侧电液换向阀按键(11)触发的联动的提升铲刀的电磁脉冲信号,以及左侧手动换向阀行程开关(12)和右侧手动换向阀行程开关(13)触发的联动的提升铲刀的电信号,系统回到并执行步骤1;如果读取到了所述双手动端的联动电磁脉冲或电信号,系统结束控制程序的运行;需要说明的是,当驾驶员按下控制面板(14)上的半自动找平键时,系统可处于半自动找平模式,其控制步骤只需执行所述找平装置工作循环的21个步骤中的步骤1、2、5、8、11、14、15、18、19、20和21;半自动找平模式主要适用于在没有GPS-RTK信号时的场合,驾驶员在操作时需在控制面板(14)上通过按键预先选定铲刀的某一侧为对刀寻迹侧,该侧也被设定为凭经验进行半自动找平的手动控制侧,另一侧则为对比刀角的自动控制侧。
2.如权利要求1所述的一种基于GPS-RTK技术的平地机人工辅助自动找平装置,其特征在于:所述的左侧传感器(2)或右侧传感器(4),二者均由GPS-RTK定位单元和对中杆组成,它们通过左侧传感器支架(3)和右侧传感器支架(5)安装在铲刀两端的上方,负责在铲刀处于各种姿态全工况条件下按照一定的刷新频率输出铲刀刃角点的空间三维坐标值,所述定位信息输出的刷新频率应大于自动驾驶与找平系统控制循环的频率;所述对中杆的长度以GPS-RTK定位单元在接收信号时不受影响为准。
3.如权利要求1所述的一种基于GPS-RTK技术的平地机人工辅助自动找平装置,其特征在于:所述的左传感器支架(3)或右传感器支架(5),它们由三部分组成,一是上端与对应的左侧传感器(2)或右侧传感器(4)的对中杆末端可拆卸式的连接部分,二是可以被锁止不动的中间活动连接部分,三是下端与铲刀可拆卸式的连接部分;所述的可以被锁止不动的中间活动连接部分,可以采用测量仪器三脚架上的云台结构,采用其他结构时,需要满足2个条件,一是左侧传感器(2)或右侧传感器(4)的对中杆在中间活动连接部分被锁止前能沿与铲刀横向轴线平行的轴线前后摆动,并能沿与铲刀横向轴线垂直的轴线左右摆动,以便完成左侧传感器(2)和右侧传感器(4)的初始化校准标定作业;二是左侧传感器(2)或右侧传感器(4)的对中杆在其末端侧的延长线在工作位或校准位时能过铲刀刃角点。
4.如权利要求1所述的一种基于GPS-RTK技术的平地机人工辅助自动找平装置,其特征在于:所述的倾角传感器(6),它通过倾角传感器支架(7)安装在能与铲刀一起倾斜而不与铲刀一起回转的铲刀牵引架上,负责在铲刀处于各种姿态全工况条件下按照一定的刷新频率输出铲刀横向倾角值,所述倾角信息输出的刷新频率应大于自动驾驶与找平系统控制循环的频率。
5.如权利要求1所述的一种基于GPS-RTK技术的平地机人工辅助自动找平装置,其特征在于:所述的倾角传感器支架(7),它由三部分组成,一是上端与倾角传感器(6)可拆卸式的连接部分,二是可以被锁止不动的中间活动连接部分,三是下端与铲刀牵引架可拆卸式的连接部分;所述的可以被锁止不动的中间活动连接部分,可使倾角传感器(6)在测量角度方向上可以摆动,以便完成倾角传感器(6)的初始化校准标定作业。
6.如权利要求1所述的一种基于GPS-RTK技术的平地机人工辅助自动找平装置,其特征在于:所述的左侧电液换向阀(8)和右侧电液换向阀(9),它们分别安装在左侧铲刀升降油缸手动换向阀和右侧铲刀升降油缸手动换向阀的旁侧,它们的阀体之间串联连接成组合阀的结构;左侧电液换向阀(8)与左侧铲刀升降油缸手动换向阀的油路之间,以及右侧电液换向阀(9)与右侧铲刀升降油缸手动换向阀的油路之间,均采用并联连接;如果是在现有平地机上加装本电液换向阀,可以采取定制的方式,使其阀体的结构形式特别是连接形式与原机的保持一致。
7.如权利要求1所述的一种基于GPS-RTK技术的平地机人工辅助自动找平装置,其特征在于:所述的左侧电液换向阀按键(10)和右侧电液换向阀按键(11),它们可以分别安装在控制面板(15)上,每一侧分别有向上或向下2个手动按钮或按键或摇杆方向,为便于驾驶员操作,其也可以采用脱离控制面板(15)的分体结构形式;它们被触发而产生的电磁脉冲控制信号,能驱动左侧电液换向阀(8)和右侧电液换向阀(9)微动,从而实现左右侧铲刀升降油缸的微动,以便于驾驶员进行对刀作业。
8.如权利要求1所述的一种基于GPS-RTK技术的平地机人工辅助自动找平装置,其特征在于:所述的左侧手动换向阀行程开关(12)和右侧手动换向阀行程开关(13),其可以分别安置在左侧手动换向阀和右侧手动换向阀的阀体内或阀体上,也可以安置在左侧和右侧手动换向阀以外的其他连动零部件上。
9.如权利要求1所述的一种基于GPS-RTK技术的平地机人工辅助自动找平装置,其特征在于:所述的控制面板(14),它由显示屏或触摸屏、按钮或按键或摇杆、轮盘式选择键、数字键盘(含USB键盘)、指示灯、报警蜂鸣器组成,它的基本配置按键有五组,一般为带指示灯的循环按键,具体包括:一组为作业条件限定按键,用于指示作业场地坡度和引导程序运行,有可以成对或单独使用的表示左倾坡的左边桩-左中桩键,表示右倾坡的右中桩-右边桩键,表示水平坡的中桩键;还有用于指示作业方向和引导程序运行的桩点编号升/降序排列键;二组为起始桩点坐标地址选择确认键,有作业基准线Lj、起始桩点坐标Ki(xi,yi)、预设高程Ki(zi±Δ)和选择确认键;三组为对刀确认键,有铲刀左侧刃角点对刀、铲刀右侧刃角点对刀和对刀侧的高程对刀键;四组为操作模式键,有自动找平、半自动找平和休眠键;五组为铲刀升降微动按键,有左侧上升↑与左侧下降↓、右侧上升↑与右侧下降↓键;此外,控制面板(15)上还可以设置人工驾驶轨迹偏左和偏右报警指示灯,以方便驾驶员无桩寻迹;还应设置RTK信号报警指示灯和电源键。
10.如权利要求1所述的一种基于GPS-RTK技术的平地机人工辅助自动找平装置,其特征在于:所述的控制盒(15),安装或固定于驾驶室内;由盒体、主板、单片机或PLC或工业控制机、数据输入器或键盘或手簿、桩点参数导入USB接口、数据转换模块、通信模块、输入输出接口、总线和电源组成;其输入端与前述的左侧传感器(2)、右侧传感器(4)、倾角传感器(6)、左侧电液换向阀按键(10)和右电液换向阀按键(11),以及左侧手动换向阀行程开关(12)和右侧手动换向阀行程开关(13)的输出端接口有线或无线连接,其输出端与左侧电液换向阀(9)、右侧电液换向阀(10)和转向电液换向阀(14)的输入端连接,它可与控制面板(15)集成为一个整体。
请联系平台
请联系平台




