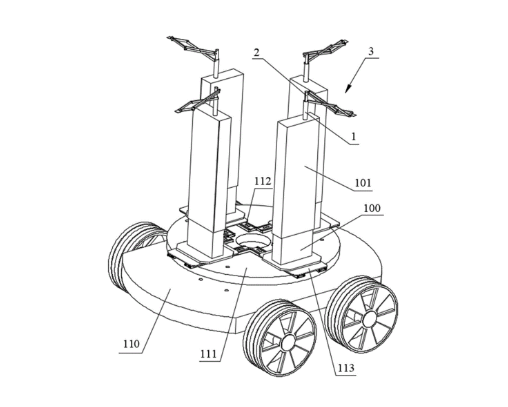
本实用新型公开了一种机械手抓取装置,该机械手抓取装置包括移动机构,移动机构上转动设置有转盘,转盘上设置有多个伸缩组件,多个伸缩组件沿转盘周向方向均匀分布,多个伸缩组件沿转盘的径向方向伸缩,每个伸缩组件上均设置有并联机械手,并联机械手上设置有驱动组件,多个伸缩组件伸缩,以使每个伸缩组件上相应的并联机械手相对于转盘沿转盘的径向方向移动,将并联机械手移动至待抓取件处,驱动组件驱动并联机械手运动以对待抓取件进行抓取。本实用新型提供的机械手抓取装置,工作时首先利用移动机构和转盘工作范围大的特性,将并联机械手转动至指定位置,再通过驱动组件驱动并联机械手小范围内运动,实现对待抓取件的精确抓取、搬运或分拣。
1.一种机械手抓取装置,其特征在于,包括移动机构,移动机构上转动设置有转盘,转盘上设置有多个伸缩组件,多个伸缩组件沿转盘周向方向均匀分布,多个伸缩组件沿转盘的径向方向伸缩,每个伸缩组件上均设置有并联机械手,并联机械手上设置有驱动组件,多个伸缩组件伸缩,以使每个伸缩组件上相应的并联机械手相对于转盘沿转盘的径向方向移动,将并联机械手移动至待抓取件处,驱动组件驱动并联机械手运动以对待抓取件进行抓取。
2.根据权利要求1所述的机械手抓取装置,其特征在于,并联机械手包括支架和滑动架,滑动架滑动套设在支架外,滑动架上滑动设置有滑动管,滑动管内滑动套设有滑动杆,滑动管和滑动管上铰接有并联臂组件,滑动管远离并联臂组件的一端螺接第一丝杠,滑动杆远离并联臂组件的一端螺接第二丝杠,第一丝杠一端与第二丝杠的一端连接,第一丝杠的螺纹方向与第二丝杠的螺纹方向相反,驱动组件驱动第一丝杠和第二丝杠沿第一方向旋转,滑动管沿第二方向运动,滑动杆沿第二方向的反方向运动,以使并联臂组件沿第三方向缩短,驱动组件驱动第一丝杠和第二丝杠沿第一方向的反方向旋转,滑动管沿第二方向的反方向运动,滑动杆沿第二方向运动,以使并联臂组件沿第三方向的反方向伸长。
3.根据权利要求2所述的机械手抓取装置,其特征在于,驱动组件包括第一驱动件,第一驱动件设置在第二丝杠远离第一丝杠的一端,第一驱动件驱动第一丝杠和第二丝杠沿第一方向或第一方向的反方向旋转,以使滑动管沿第二方向或第二方向的反方向运动,滑动杆沿第二方向的反方向或第二方向运动,以使并联臂组件伸长或缩短。
4.根据权利要求3所述的机械手抓取装置,其特征在于,并联机械手还包括第一连接件和第二连接件,第一连接件上设置有第一滚珠轴承,第二连接件上设置有第二滚珠轴承,第一连接件一端与第一丝杠螺接,第一连接件的另一端通过第一滚珠轴承与滑动管连接,第二连接件的一端与第二丝杠螺接,第二连接件的另一端通过第二滚珠轴承与滑动杆连接。
5.根据权利要求2所述的机械手抓取装置,其特征在于,滑动管上设置有沿第二方向延伸的凹槽,滑动杆上设置有沿第二方向延伸的凸起,滑动杆与滑动管沿第二方向或第二方向的反方向运动时,凸起在凹槽内滑动。
6.根据权利要求2所述的机械手抓取装置,其特征在于,驱动组件还包括第二驱动件,第二驱动件设置在支架上,第二驱动件与滑动杆连接,第二驱动件驱动滑动杆绕滑动杆的轴线旋转,以使滑动管和并联臂组件绕滑动杆的轴线旋转。
7.根据权利要求2所述的机械手抓取装置,其特征在于,并联臂组件包括第一连杆和第二连杆,第一连杆一端与滑动管铰接,第二连杆一端与滑动杆铰接,第一连杆中部与第二连杆中部铰接,第一连杆远离滑动管的一端铰接第三连杆,第二连杆远离滑动杆的一端铰接第四连杆,第三连杆远离第一连杆的一端与第四连杆远离第二连杆的一端均连接移动平台。
8.根据权利要求7所述的机械手抓取装置,其特征在于,并联机械手还包括第五连杆和铰接件,第五连杆铰接在滑动杆上,第五连杆远离滑动杆的一端铰接有第六连杆,铰接件一端铰接在第五连杆和第六连杆的铰接处,铰接件另一端铰接在第二连杆和第四连杆的铰接处,第六连杆远离第五连杆的一端与移动平台铰接。
9.根据权利要求7所述的机械手抓取装置,其特征在于,并联机械手还包括第七连杆、第八连杆和限位杆,移动平台一端与第三连杆远离第一连杆的一端铰接,移动平台另一端与第四连杆远离第二连杆的一端铰接,第七连杆一端与第三连杆铰接,第七连杆另一端与第八连杆铰接,第八连杆远离第七连杆的一端与第四连杆铰接,限位杆一端设置第七连杆和第八连杆之间,限位杆另一端与移动平台滑动连接。
10.根据权利要求2所述的机械手抓取装置,其特征在于,驱动组件还包括第三驱动件和第三丝杠,第三驱动件设置在支架上,第三丝杠一端与滑动架连接,第三丝杠另一端与第三驱动件连接,第三驱动件驱动第三丝杠转动,以使滑动架在支架上沿第二方向滑动。
请联系平台
请联系平台




